一、负荷平衡概述 1、负荷,通常指机器或原动机所克服的外界阻力;而在整个传动系统当中,会遇到多台电机(一般电机功率相等)同时驱动一台机械设备的应用,需要研究每台电机的实际出力情况,以及各个电机之间相互协调的情况,通过变频器对电机进行控制,从而满足生产机械的动力需求。 2、电气传动系统中负荷平衡本质: 在电气传动系统当中,两台或者两台以上电机,同时驱动同一个机械负载,使得两台(或者多台)电机出力相同,即电机的输出转矩相同,由变频器进行控制和驱动,zui终拖动机械负载平稳运行的控制方式。(Load Sharing ) 3、典型负荷平衡的机械耦合形式: A、机械传动机构刚性连接:(比如一个滚筒的两端驱动 ) 
B、机械传动机构靠齿轮啮合:(比如一个齿盘回转机构的驱动 ) 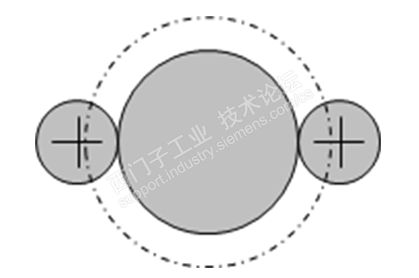
C、机械传动机构柔性连接:(比如一个长皮带的驱动 ) 
二、变频器实现负荷平衡的控制方法 在多机传动中,速度同步运行是zui基本的控制方式,可以根据不同的耦合方式选择不同的负荷平衡方法。一般电动机轴耦合方式分为两种,一种为刚性耦合,另外一种为柔性耦合,根据不同的耦合方式,选择不同的控制方式。 所谓刚性耦合,即电动机轴之间通过万向节、传动辊、齿轮等硬连接方式进行耦合。在这种情况下,只要其中一个传动运行,另外一个或几个传动也将同时运行,多电机之间不能有速度误差。如果电动机轴刚性耦合,其主从控制遵循下列控制方式: (1)主传动单元为速度控制; (2)从传动单元跟随主传动单元的转矩给定。 所谓柔性耦合,即几个不同的电动机轴之间通过物料、皮带等软连接方式进行耦合。在这种情况下,只要其中一个传动进行运动,另外一个或几个传动也将被拖动,但也有可能打滑,多电机之间允许存在细微的速度误差。如果电动机轴柔性耦合,其主从控制遵循下列控制方式: (1)主传动单元为速度控制; (2) 从传动单元跟随主传动单元的速度给定。 负荷平衡,主从变频器采用的控制方式: 转矩耦合模式 (1)主装置为速度闭环,速度调节器使用PI调节器 (2)从装置为速度闭环,速度调节器使用P调节器 (3)将主装置速度调节器输出的积分量转矩给定作为从装置的附加转矩给定 (4)主装置和从装置分别使用各自的转矩预控 (5)主装置和从装置的速度给定值相同 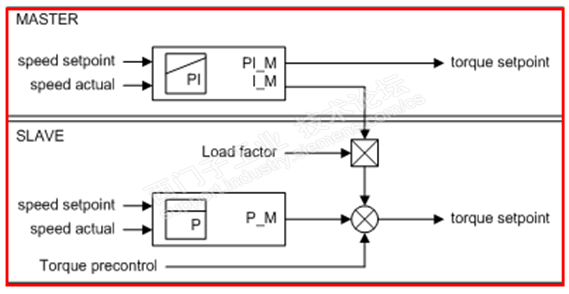
速度饱和转矩限幅模式 (1) 主装置和从装置均为速度闭环,速度调节器使用PI调节器 (2) 将主装置速度调节器输出的转矩给定加上预控转矩作为从装置的转矩限幅 (3) 主装置和从装置分别使用各自的转矩预控 (4) 从装置的速度给定值为主装置速度给定值乘以偏差系数,使其速度环饱和 (5) 从装置速度环饱和后,其转矩给定值为转矩限幅值 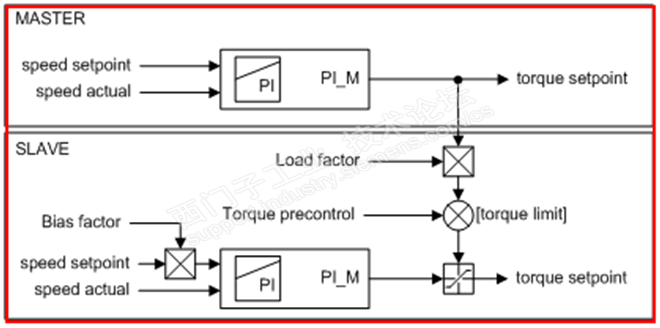
三、负荷平衡的典型应用举例 1、负荷平衡在盾构机刀盘驱动上的应用: 
2、负荷平衡在长皮带驱动的应用: 
3、负荷平衡在顶驱的应用: 
4、负荷平衡在卷扬机的应用: 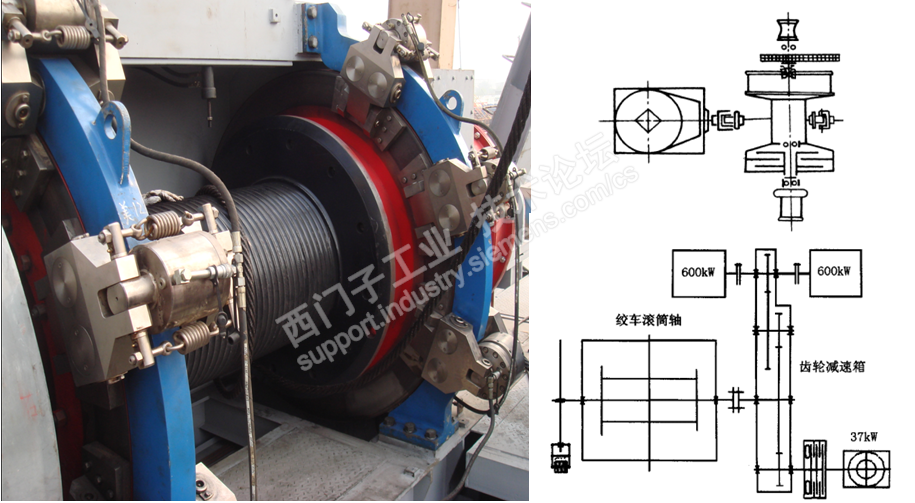
四、负荷平衡的应用注意事项 负荷平衡不仅仅是转矩的平衡,主从的特性要求一致,这将涉及到众多因素: 1、各装置应设置一致的参考值(速度,电流,转矩,激磁去磁时间等)。 2、通过设置斜坡时间限制加减速,设置圆弧平滑时间防止冲击,各装置应设置一致。 3、关闭从机斜坡函数发生器跟踪功能,(P1145=0)防止从机速度环退饱和造成的系统波动。 4、多机负荷分配控制应该设有单动/联动功能,在调试检修过程 中可能需要单独起动其中一台电机,在正常运行中需要同时启动、同时停止。 5、必须采用故障联锁功能,可以监控各变频器的故障状态,作为所有设备联动运行的条件。 6、对于负荷平衡的机械设备抱闸的控制,需要由外围PLC单独做逻辑控制,防止出现单台变频器故障,单台抱闸投入情况。 7、对于“一主多从”的配置,需要考虑主机故障时,任意其他从机作为主机,继续运行保障生产的连续进行。 8、负荷平衡设计应该根据工艺传动要求和工艺操作要求进行合理设计,具体控制设计,要根据实际的负载性质进行设计 。 |




